
Bu kendi kendine sürüş girişimi, trafiği tahmin etmek için üretken yapay zeka kullanıyor
Otonom sürüş, rota planlamak ve nesneleri tespit etmek için uzun süredir makine öğreniminden yararlanıyor olsa da, bazı şirketler ve araştırmacılar artık üretken yapay zekanın (çevrelerinden veri alan ve tahminler üreten modellerin) otonomiyi bir sonraki aşamaya taşımaya yardımcı olacağına inanıyor. Waabi'nin bir rakibi olan Wayve, geçen yıl araçlarının topladığı videoya göre eğitilen benzer bir modeli piyasaya sürdü.
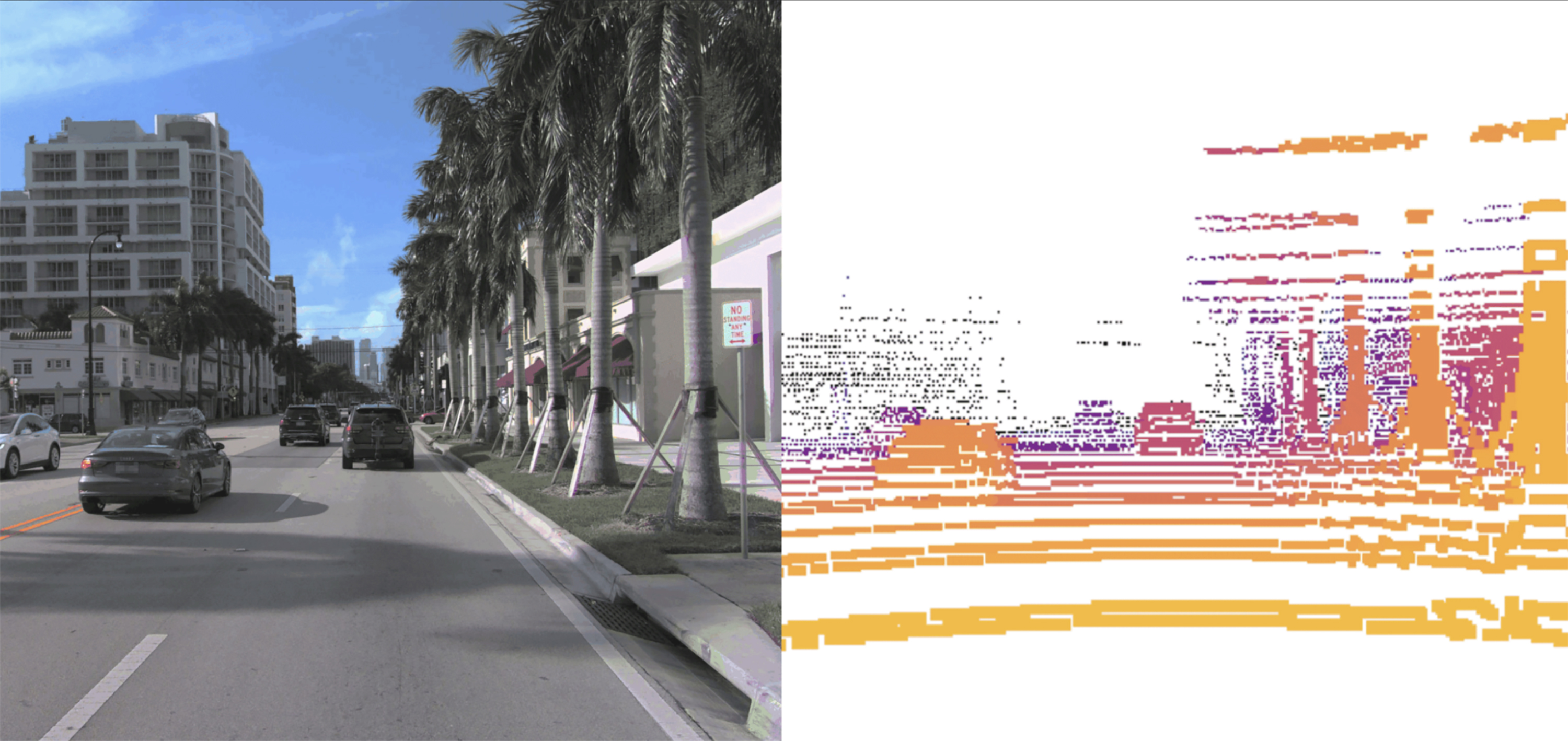
Waabi'nin modeli, OpenAI'nin DALL-E ve Sora gibi görüntü veya video oluşturucularına benzer şekilde çalışıyor. Otomobilin çevresinin 3 boyutlu haritasını görselleştiren nokta lidar verileri bulutlarını alıyor ve görüntü oluşturucuların fotoğrafları piksellere ayırmasına benzer şekilde bunları parçalara ayırıyor. Copilot4D, eğitim verilerine dayanarak Lidar verilerinin tüm noktalarının nasıl hareket edeceğini tahmin ediyor. Bunu sürekli yapmak, geleceğe 5-10 saniye içinde tahminler üretmesine olanak tanır.
Waabi, aralarında Wayve ve Ghost'un da bulunduğu, yaklaşımlarını “önce yapay zeka” olarak tanımlayan bir avuç otonom sürüş şirketinden biri. Urtasun'a göre bu, belirli durumlara tepkilerin öğretilmesi gereken bir sistem yerine, verilerden öğrenen bir sistem tasarlamak anlamına geliyor. Grup, yöntemlerinin sürücüsüz arabaların yol testinde daha az saat gerektirebileceğine inanıyor; bu, Ekim 2023'te Cruise robotaksinin San Francisco'da bir yayayı sürüklediği kazanın ardından tartışmalı bir konu.
Waabi, kameralar yerine lidar için üretken bir model oluşturma konusunda rakiplerinden farklı.
Urtasun, arabanın güvenli bir şekilde sürülmesi için insan dikkatine ihtiyaç duymadığı otomasyon seviyesine atıfta bulunarak, “Seviye 4 oyuncu olmak istiyorsanız lidar şarttır” diyor. Kameralar, otomobilin gördüklerini gösterme konusunda iyi bir iş çıkarıyor ancak mesafeleri ölçmede veya otomobilin çevresinin geometrisini anlamada o kadar da becerikli değiller, diyor.
Waabi'nin modeli, bir arabanın lidar sensörleri aracılığıyla ne göreceğini gösteren videolar oluşturabilse de, bu videolar şirketin sürüş modelini oluşturmak ve test etmek için kullandığı sürüş simülatöründe eğitim olarak kullanılmayacak. Bu, Copilot4D'den kaynaklanan halüsinasyonların simülatörde öğretilmemesini sağlamak içindir.
Stanford'da benzer modeller geliştiren ve araştıran doktora öğrencisi Bernard Adam Lange, temeldeki teknolojinin yeni olmadığını, ancak ilk kez üretken bir lidar modelinin bir araştırma laboratuvarının sınırlarını terk ettiğini ve ticari kullanım için büyütüldüğünü gördüğünü söylüyor. . Bunun gibi bir modelin genel olarak herhangi bir otonom aracın “beyninin” daha hızlı ve doğru bir şekilde mantık yürütebilmesine yardımcı olacağını söylüyor.
“Dönüştürücü olan ölçektir” diyor. “Umut, bu modellerin nesneleri tespit etmek ve insanların veya nesnelerin bir sonraki adımda nereye gidebileceğini tahmin etmek gibi daha sonraki görevlerde kullanılabilmesidir.”